Cette année, trois étudiants de Master 2 l'équipe Electro-Gramme 2009-2010 (Xavier Werner, Gilles Raets et Thomas Wéber) ont décidé, dans le cadre de l'orientation électronique, d'implémenter une régulation de déplacement "faite maison" sur le robot. Cette dernière pourra être réutilisée par les futures équipes robotiques de Gramme.
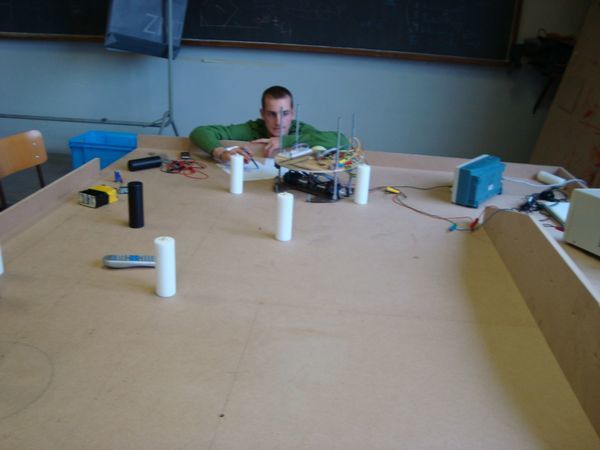
Pour rappel, la diagonale que parcourt le robot mesure plus de 3,5m et l'espace entre le bord du robot et les cylindres est à peine d'un centimètre de chaque côté. Si le robot dévie de plus que ce petit écart, il percute un cylindre. D'où le défi de la régulation afin de se corriger en temps réel...
La régulation agit à deux niveaux : à la fois du côté PC pour corriger la trajectoire et suivre la trajectoire "idéale", et au niveau de la commande des moteurs, pour veiller à ce que la consigne envoyée soit appliquée dans les plus brefs délais (il faut vaincre l'inertie du robot entre autre).
La régulation était un mal nécessaire. En effet, l'an dernier, par manque de temps, le déplacement du robot n'étant pas régulé, ce dernier avancait par très courts déplacement. Il recalculait alors sa nouvelle trajectoire à chaque arrêt pour compenser sa déviation. Comme on le voit sur la vidéo du concours ou sur celle ci-dessous, cela ralentissait énormément le robot et le déplacement n'était pas très rectiligne.
Cette année, après insertion du nouveau module de régulation de déplacement, voici le résultat (à comparer avec la vidéo précédente !) :
Alors, pas si mal hein?! :-)
PS : bonnes fêtes et meilleurs voeux à tous